sábado, 22 de octubre de 2016
domingo, 2 de octubre de 2016
Prácticas básicas WeDo 1.0 para Scratch 1.4 y 2.0

Prácticas con motores
Giro continuo sin fin


Un giro completo aproximado


Un medio giro aproximado y volver


Giro y volver continuo


Giro en un sentido u otro según la tecla pulsada


Prácticas con sensor de inclinación y motores
Girar el motor al inclinar el sensor en cualquier dirección


Girar el motor a izquierda o derecha según se incline el sensor a izquierda o derecha


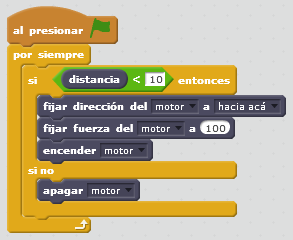
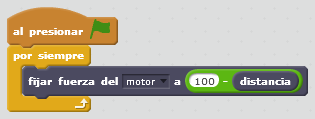
Prácticas con sensor de distancia y motor
El motor gira al acercarse y se para al alejarse (muerde)

El motor gira y vuelve al acercarse y se para al alejarse (mastica)


El motor acelera al acercarse

Suscribirse a:
Comentarios (Atom)