Easy Plug Learning Kit (wiki Keyestudio)
(Artículo en construcción - Programa beta)
Se recomienda hacer las pruebas en buenas condiciones de luz. Sino es así, el sensor de luz detectará siempre un valor bajo de luz y no se apreciarán ciertos efectos.
El objetivo es conectar y aprovechar la placa de expansión adquirida como producto complementario para analizar varias funcionalidades combinadas y realizar pruebas libres intercambiando componentes:Se recomienda hacer las pruebas en buenas condiciones de luz. Sino es así, el sensor de luz detectará siempre un valor bajo de luz y no se apreciarán ciertos efectos.
- Siguelíneas.
- Evitaobstáculos.
- Robot dirigible por joystick.
- Sensor de luz.
- Secuencias de colores, semáforo y otros.
El kit dispone de una placa de cartón duro que se fija mediante unos pernos como base. Como la longitud de los pernos es sólo un poco menor que el espacio entre placa Arduino y base acartonada, con sólo aflojar un poco los tornillos se pueden insertar los servomotores. Incluso sin retirar los conectores, ha funcionado el robot generado rápidamente así.

Los conectores y componentes utilizados al inicio son los que indicamos a
continuación, pero aprovechando la misma programación podemos probar
otros muchos y experimentar simplemente intercambiando módulos o
conectando otros que tengamos disponibles.
A0 - IR siguelíneas en la placa principal (o en la placa de expansión).
A1 - IR siguelíneas en la placa principal (o en la placa de expansión.
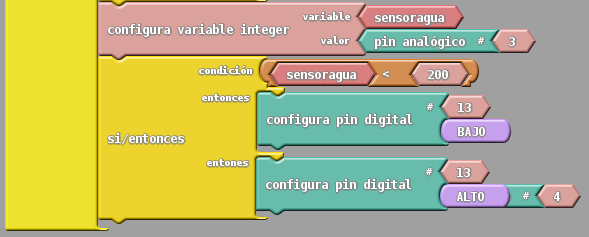
A2 - Sensor de luz en la placa principal (activa D13).
JoyStick de 5 cables conectado en la placa de expansión:
A4 - Tres primeros cables agrupados.
A5 - Cuarto cable a pin externo.
D7 - Quinto cable a pin externo para controlar la parada.
Cuidado. Según la placa, los pines a veces están en orden distinto.
Sensor de ultrasonido en placa de expansión (activa D8).
D0 - Cables agrupados.
D1 - Cuarto cable.
D2 - Potenciómetro (placa principal).
D3 - Botón pulsador (placa principal).
D4 - Sensor táctil (activa el D12).
D8 - Zumbador activo en placa principal. Led en placa de expansión.
D9 - Servomotor continuo de 360 grados en placa de expansión.
D10 - Servomotor continuo de 360 grados en placa de expansión.
D11 - Led en placa de expansión .
D12 - Led en la placa de expansión.
D13 - Led en la placa de expansión y otro led en la principal.

A0 - IR siguelíneas en la placa principal (o en la placa de expansión).
A1 - IR siguelíneas en la placa principal (o en la placa de expansión.
A2 - Sensor de luz en la placa principal (activa D13).
JoyStick de 5 cables conectado en la placa de expansión:
A4 - Tres primeros cables agrupados.
A5 - Cuarto cable a pin externo.
D7 - Quinto cable a pin externo para controlar la parada.
Cuidado. Según la placa, los pines a veces están en orden distinto.
Sensor de ultrasonido en placa de expansión (activa D8).
D0 - Cables agrupados.
D1 - Cuarto cable.
D2 - Potenciómetro (placa principal).
D3 - Botón pulsador (placa principal).
D4 - Sensor táctil (activa el D12).
D8 - Zumbador activo en placa principal. Led en placa de expansión.
D9 - Servomotor continuo de 360 grados en placa de expansión.
D10 - Servomotor continuo de 360 grados en placa de expansión.
D11 - Led en placa de expansión .
D12 - Led en la placa de expansión.
D13 - Led en la placa de expansión y otro led en la principal.
Cuidado:
- No fuerces los componentes.
- Si las pilas no tienen suficiente potencia, no funcionarán algunos componentes o lo harán de forma poco previsible.
- Si alguno de los leds o componente se estropea, puede afectar al funcionamiento de las pruebas que vamos a hacer. Sería necesario retirarlo o sustituirlo por uno que funcione apropiadamente. De hecho, un simple led defectuoso puede hacer que las conexiones no sean apropiadas y provocar efectos no esperados.
- Pide ayuda cuando tengas dudas.
Efectos extraños o no esperados:
- Se recomienda hacer las pruebas en buenas condiciones de luz, o no se apreciará el funcionamiento del sensor de luz o afectará a otras pruebas.
- Para activar adecuadamente un modo u otro en los servomotores, es necesario girar completamente el potenciómetro a un lado u otro.
- Se han encontrado problemas al conectar miniservos de 180 grados de rotación y ciertos motores-hélice que provocaban vibraciones en las luces o afectaban a las conexiones causando parpadeos y efectos no esperados, por lo que se realizarán nuevas pruebas en un futuro para poder incluirlos.
- Colocar el ultrasonido "orientado hacia el techo" y sin ningún obstáculo delante para evitar que el zumbador suene continuamente. Podemos desconectar el zumbador D8 de la placa principal y dejar sólo el led en la placa de expansión para al menos ver que funciona.
- Probar el ultrasonido acercando o alejando objetos, con y sin el zumbador conectado.
- Comprobar que el potenciómetro está en la posición que permite que el joystick controle los servomotores. Para parar los servomotores pulsamos el joystick hacia abajo.
- Una vez parados los servomotores, movemos la palanca del joystick para comprobar en qué casos se mueven uno o los dos motores y en qué direcciones.
- De forma provisional, podemos añadir nuevos leds 0 en la placa principal y comprobar los efectos que se producen, pero es recomendable no dejarlos conectados.
- Tapar el sensor de luz para comprobar que se enciende el led D13. Si no hay condiciones de luz adecuadas, puede que no funcione apropiadamente e influya en el funcionamiento de la siguiente prueba de cambio de luces.
- Pulsar el botón D3 para comprobar que se produce el cambio de luces en D11, D12 y D13. Conviene que sean de distinto color tanto en la placa principal como en la placa de expansión para así poder simular un semáforo durante ese instante.
- Pulsar el sensor táctil D4 para comprobar que se produce cambio en D12.
- Cambiar el sensor táctil por un sensor de choque para comprobar nuevos efectos.
- Colocar el potenciómetro en posición de avance autónomo de los servomotores. Deberán de ponerse en marcha solos.
- En posición de avance autónomo, comprobamos lo que ocurre al tapar los sensores IR (infrarrojos) siguelíneas.
- Seguimos probando los IR (infrarrojos) siguelíneas acercando objetos de color negro probando que tapen uno, los dos o ninguno de los IR.
- Realizar la misma operación anterior cambiando con un folio blanco debajo y cambiando de blanco a negro.
- Cambiar los componentes por otros. Por ejemplo, leds por zumbadores, sensores de luz por potenciómetros o botones pulsadores por otros (sensores magnéticos, sonido...).
- Volver a conectar todo como al inicio e insertar los servomotores entre la placa principal y la placa de soporte para simular un robot con ruedas.
- En modo de robot con ruedas, probar el funcionamiento del potenciómetro y el joystick.
- En modo de robot con rueda, probar a poner el ultrasonido en una posición que detecte obstáculos y le permita girar antes de chocar.
- Intentar crear un robot siguelíneas. Nos podemos ayudar de cinta adhesiva transparente, gomas u otros objetos que no dañen la placa para fijarlos de forma provisional.
- Realizar otras pruebas con cuidado y preguntando si es necesario.